|
I am currently a Robotics Test Engineer at SharkNinja. I have completed my Masters degree in Mechanical Engineering (Robotics) from Virginia Tech (VT). There, I worked at Vibrations and Robotics Lab, under the guidance of Dr. Oumar Barry. I received my undergraduate degree from Indian Institute of Technology Madras (India), where I worked with Dr. Sujatha Srinivasan at TTK Center for Rehabilitation Research and Device Development (R2D2). My research interest lies within the areas of Robotics, Control Systems, Deep Learning and Computer Vision. |

|
Email / Resume / LinkedIn / Github / Google Scholar
Sections |
Skills & InterestsRobotics, Modeling and Simulations, Mechanical Design, Deep Learning, Computer Vision, Control Systems, Data Analysis ProgrammingPython, C++, C, MATLAB, Simulink, LabVIEW, Linux, Bash, Git, R, SQL, Jupyter Robotics and AIROS2, Gazebo, RViz, OpenAI Gym, Raspberry Pi, Arduino, OpenCV, TensorFlow, Keras, PyTorch, Scikit-Learn, CUDA Mechanical Design and AnalysisAutoCAD, PTC Creo, SolidWorks, MSC ADAMS, ANSYS |
Work Experience |
|
|
Jun 2024 - Present Developing software for automated mechanisms for evaluating component and product performance for Shark products Leading the development of NLP and LLM-based pipelines for faster and accurate semantic analysis and information retrieval from test reports and procedures, enabling faster decision-making Implemented Computer-Vision based methods for automated visual inspections to improve accuracy and repeatability Developed and implemented the motion planning pipeline for a 3-axis gantry system with pitot tubes to obtain airflow profiles for irregularly shaped hairbrushes |

|
Jan 2023 - May 2024 Project Title: Tremor Suppressing Exoskeleton Github Link Thesis Link Developed a CNN-LSTM framework incorporating physics-based losses for the modeling of pathological tremors using EMG signals and IMU sensor data Formulated the dynamics, and developed a Model Predictive Controller for a 6 DOF wearable exoskeleton arm aimed to suppress pathological tremors and support user voluntary movement Performed SIIL and HIIL testing to validate controller performance, verify system integration and real-time reliability Published and presented 2 first-author conference papers based on the findings of the research works |

|
Aug 2020 - Aug 2022 Led a team of 4 and collaborated with diverse internal teams to develop Machine Learning models for analyzing and extracting insights from large amounts of data to scale-up of hyperlocal business Developed root-cause reports to address product returns and implemented catalogue changes to reduce returns Built and owned automated reporting using SQL, Power BI, and Google Data Studio to track and provide insights on supply KPIs Awards Won: Mission Impossible (Jun 22), SPOT Award (Mar 22), Instant Karma (Sep 21, Dec 21) |

|
Sep 2019 - July 2020 Project Title: Cyclic Knee-Testing Mechanism Poster Link Developed a crank rocker-based mechanism to simulate the swing phase knee joint movement of a walking gait cycle to test the life cycles of polycentric prosthetic knee joints Analysed the dynamics using MATLAB, validated in ADAMS, and performed fatigue failure analysis in ANSYS Selected and installed the appropriate industrial components, i.e. encoders, motor, gearbox, bearings, fasteners, etc One of the 4 finalists nominated for the best Inter-Disciplinary Bachelors Thesis Project |

|
May 2018 - July 2018 Instrumented a CO2-based cooling system aimed to improve the cooling efficiency in the CMS Outer Tracker Programmed a DAQ system to collect the sensor readings using LabVIEW, and calibrated the sensors using regressionss Performed experimentations and detailed thermal analysis to validate the simulations of the cooling system Developed a program to generate detailed thermal analysis reports from experimentations for further validations |
Relevant Projects |
|
GitHub Link Implemented event-based MPC to achieve trot and pace paits for front and lateral walking based on reduced order LIP model of the quadruped using MATLAB |
|||||||||||
|
GitHub Link Simulated a ball-chasing robot, detection via colors in OpenCV. Designed URDF model of the robot and arena Implemented localization using AMCL, deployed SLAM and Navigation to simulate obstacle avoidance operation |
|||||||||||
|
GitHub Link Implemented and compared Linear, Extended, and Unscented Kalman Filters to estimate the navigation state of a 2D vehicle using simulated GPS, LIDAR, and Gyroscope sensors |
|||||||||||
|
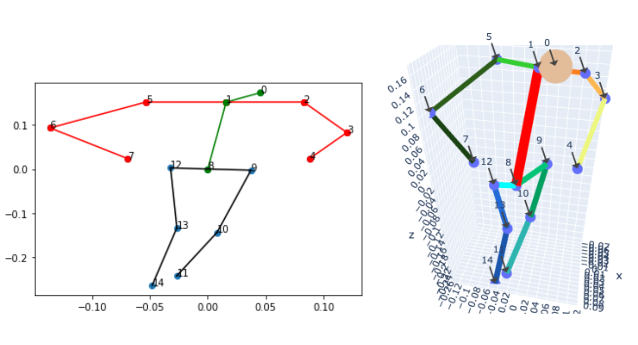
GitHub Link Implemented a Deep Generative Adversarial Network (GAN) model from scratch in Pytorch to estimate realistic 3D human poses from 2D joint positions, which were extracted from real-world images using OpenPose |
|||||||||||
|
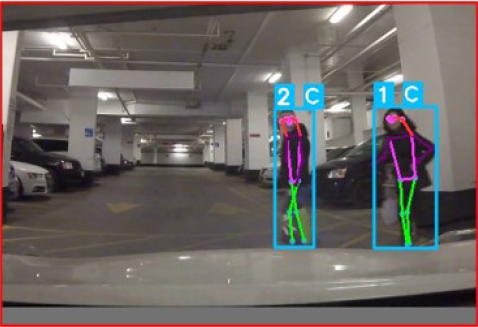
Report Link Developed a framework combining CNN-based visual encoders, GRU with attention mechanisms to predict pedestrian crossing intentions in natural traffic scenes Implemented semantic segmentation and pose estimation with OpenPose to generate features from the videos |
|||||||||||
|
GitHub Link Implemented a DQN algorithm with optimized reward functions to solve the Peg Solitaire game for different board shapes and sizes developed in Python. Further modified the algorithm for the AI to assist a human player reach highest scores basis a turn-based interaction model |
|||||||||||
|
GitHub Link Implemented a Computer Vision algorithm to compute road curvature and lane vehicle offset using OpenCV Image Processing, Camera Calibration, Perspective Transform, Color Masks, Sobels, and Polynomial Fit |
|||||||||||

|
GitHub Link Developed bi-layer classification models using KNN, Random forests, and SVM classifiers to identify 18 physical activities using time-series data from IMU sensors, obtaining the best model accuracy at 98.5%, significantly higher compared to 89% using a single-layer classifier |
|||||||||||
|
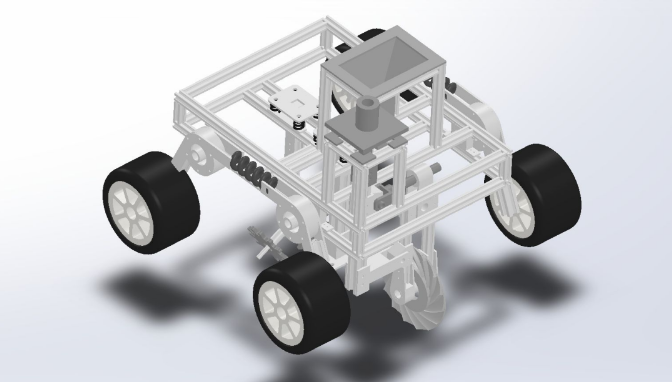
Ideated and designed a bot to perform basic agricultural processes like soil preparation, sowing and seed firming Designed various components of the robot, chose all the hardware like the microcontroller, sensors, and actuators, and presented the assembled bot in an annual Open House event |
|||||||||||
|
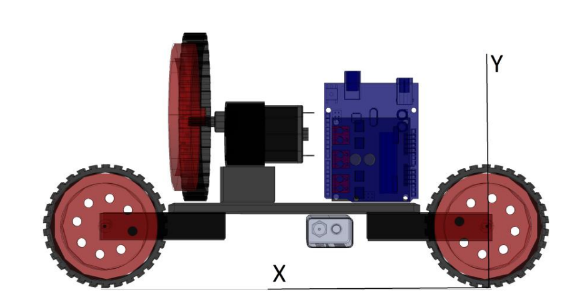
Report Link Conceived the design and manufactured the chassis and flywheel of the self-balancing bicycle Analysed the dynamics of the closed loop system in Simulink and implemented PID control systems by installing Arduino controllers, motor drivers and MPU 6050 sensor |
|||||||||||
|
Video Link Spatially mapped 2D videos onto a 3D environment using surface maps, thus creating an augmented reality Created a virtual environment in tune with audio and human interaction to give illusions of depth and motion, using an IR Sensor based feedback control system for positioning accuracy |
Conferences & Proceedings |
|
Subham Swastik Samal, Oumar Barry International Design Engineering Technical Conferences & Computers and Information in Engineering Conference ASME Presented a hybrid CNN-LSTM based deep learning architectures to predict the tremor kinematics ahead of time using EMG signals and tremor kinematics history |
|
Subham Swastik Samal, Oumar Barry 3rd Modeling, Estimation and Control Conference (MECC 2023) Elsevier Proposed a MPC (model-based predictive control) contol system for a full wrist exoskeleton designed for the alleviation of tremors in patients suffering from Parkinson's Disease and Essential Tremor using successive linearization. |
Clubs and Activities |
|
Ideated and developed an autonomous farming bot, which was presented in the CFI Open House. Managed club inventory and finance, organised Manual Robotics Challenges in TECHSOC, conducted hands-on sessions on elementary robotics and design topics for freshmen |

|
Organized India’s only student orchestrated techno-entertainment pro show in front of a 5k+ audience. Responsible for managing club inventory and conducting promotional campaigns for Shaastra. Invited as a professional artist for technical festivals of other universities (Anna University) for the first time Envisage 2018 Lookback Videos |
|
Last updated: Apr 29, 2024 |